5 篇文章
TRI 研發新方法:教導機器人在一夜間快速成長
Toyota Research Institute(TRI)正在開發一種教導機器人的新方法人工智慧和機器學習的前沿機器學習可能是機器人領域中最令人興奮的前沿。這個領域的誕生可以追溯到數十年前,例如上世紀八十年代,透過示範學習這一方法開創了機器人學習的新局面。然而來自 CMU、MIT 和 UC Ber

哈佛科學家發現,小孩子王成為給機器人「學習」的新靈感
人類幼童啟發機器人學習的新方法摘要在機器人學習領域,正在迎來一個令人振奮的時刻。多年來,組織一直在建立複雜的資料集,並開創各種不同的方式來教導系統執行新任務。我們似乎即將取得一些關鍵突破,能夠展示技術在處理即時適應和學習的能力方面的真實應用。在過去的一年裡,我們見證了許多令人着迷的研究成果。例如,卡
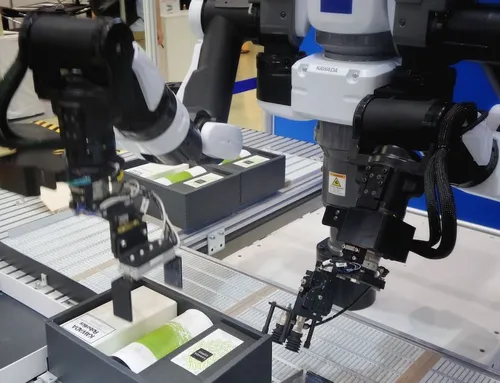
機器人執行重複性任務的學習能力改進新技術
科技進步:用新技術提高機器人的學習能力研究背景自動化在現代生產中扮演了越來越重要的角色,而機器人技術是自動化的重要支柱之一。然而在執行重複性任務時,機器人面臨著一些困難,例如準確性、效率和速度。當前多數工業機器人使用的迭代學習控制系統(ILC)是透過比例型更新規則(PTUR)學習的。然而隨著 ILC
多腳機器人學習像動物一樣的地形動力學特性
多腳機器人學習地形的物理特性:模擬動物學習能力的突破近日《National Science Review》刊登了一篇探討如何讓多腳機器人像動物一樣學習地形物理特性的研究論文。哈爾濱工業大學的丁亮教授和他的團隊提出了一種無監督學習框架,透過機器人的視覺和觸覺來感知和預測地形物理特性,學習並調整自己的認
研究人員使用新方法教導機器人穿越障礙物
新方法教機器人穿越障礙物喬治亞理工學院的三位博士生使用新方法,教導四足機器人穿越障礙物。這個方法包含高級視覺導航政策和視覺化行走政策。這個新的方法可以教導機器人在室內環境中,包含家居雜亂物品,例如鞋子或玩具的地面上走路,讓機器人可以避免碰到障礙物,而不是照著以往的反應式步態反射行動。他們將這個方法稱
- 人工智慧 (1204)
- AI (728)
- Google (427)
- 蘋果 (419)
- 投資 (406)
- 新創公司 (363)
- 亞馬遜 (268)
- 微軟 (264)
- 加密貨幣 (263)
- 遊戲 (258)
- 應用程式 (255)
- 特斯拉 (239)
- openAI (228)
- 電動車 (222)
- 收購 (220)
- 技術 (214)
- Meta (212)
- 美國 (208)
- 融資 (203)
- chatGPT (200)
- 印度 (197)
- CEO (181)
- 社交媒體 (177)
- 金融科技 (170)
- Twitter (153)
- 裁員 (152)
- 機器學習 (151)
- 合作 (150)
- TikTok (149)
- 歐盟 (147)
- 籌資 (145)
- 生成式人工智慧 (145)
- Reddit (131)
- Instagram (124)
- 比特幣 (121)
- Netflix (121)
- 機器人 (112)
- Nvidia (112)
- 科技 (111)
- 網路安全 (110)
- 新功能 (110)
- iPhone (109)
- 公司 (108)
- 初創企業 (106)
- 聊天機器人 (105)
- 企業 (105)
- 新聞 (105)
- 測試 (105)
- 英國 (104)
- 自動化 (104)
- YouTube (103)
- 三星 (103)
- 支援 (103)
- 研究 (102)
- 未來 (101)
- 投資者 (99)
- Spotify (97)
- Threads (95)
- 籌集資金 (95)
- 風險投資 (94)
- 推出 (94)
- 募資 (92)
- 創新 (92)
- wordpress (91)
- 資料分析 (89)
- 創業 (89)
- web3 (87)
- 上市 (87)
- 平臺 (86)
- 估值 (86)
- 調查 (84)
- 功能 (83)
- 科技新聞 (83)
- 歐洲 (81)
- 安全 (80)
- 資金 (74)
- Apple (74)
- AI 技術 (73)
- 手機 (73)
- Android (73)
- 更新 (71)
- Xbox (69)
- 擴充套件 (69)
- 訴訟 (68)
- 區塊鏈 (68)
- 生成式 AI (67)
- 資金籌集 (67)
- 交易 (67)
- 使用者 (67)
- 駭客 (66)
- 創作者 (66)
- 深度學習 (66)
- 2024 年 (66)
- WhatsApp (65)
- 挑戰 (64)
- 競爭對手 (64)
- 升級 (63)
- 價格 (63)
- 優惠 (63)
- 基金 (61)
- 工具 (61)
- iOS (61)
- Facebook (60)
- 影響 (60)
- 馬斯克 (59)
- 評測 (59)
- 2023 年 (59)
- 環保 (59)
- 市場 (58)
- 籌集 (58)
- 索尼 (58)
- 福特 (57)
- 駭客攻擊 (57)
- 開發者 (57)
- 智慧家居 (57)
- 技術發展 (57)
- 員工 (56)
- AI 模型 (56)
- 中國 (56)
- 自然語言處理 (55)
- 上線 (55)
- TechCrunch (54)
- 技術創新 (54)
- IPO (54)
- SpaceX (53)
- 影片 (53)
- iOS17 (53)
- VisionPro (53)
- 宣布 (52)
- Microsoft (50)
- 廣告 (50)
- 競爭 (50)
- 新創企業 (49)
- 太空探索 (48)
- iPhone15 (48)
- 關閉 (48)
- 迪士尼 (48)
- 科技公司 (48)
- 資料隱私 (48)
- 風險 (48)
- Twitch (48)
- 創辦人 (47)
- Windows11 (47)
- 可持續發展 (47)
- Waymo (46)
- Amazon (46)
- Uber (46)
- (45)
- 開源 (45)
- 電影 (45)
- 手機遊戲 (45)
- 伊隆·馬斯克 (45)
- SEC (45)
- 監管 (44)
- 解決方案 (44)
- 銷售 (44)
- FTC (43)
- 預告片 (43)
- 安全漏洞 (42)
- X (42)
- 警告 (42)
- 售價 (42)
- 埃隆·馬斯克 (42)
- Adobe (42)
- 預測 (41)
- 創業公司 (41)
- startup (41)
- 非洲 (41)
- 問題 (41)
- scrum (41)
- 自駕車 (41)
- 探索 (41)
- TechCrunchDisrupt (40)
- 體驗 (40)
- 元宇宙 (40)
- 任天堂 (40)
- Cruise (40)
- NFT (40)
- 開發 (39)
- 研究人員 (39)
- Solana (39)
- AI 工具 (39)
- 報告 (39)
- Roblox (38)
- 辭職 (38)
- 爭議 (38)
- 執行長 (38)
- 耳機 (38)
- 加州 (38)
- 太空科技 (37)
- 威脅 (37)
- 曝光 (37)
- PS5 (37)
- 應用 (37)
- 服務 (37)
- 約束 (36)
- 成功 (36)
- Discord (36)
- 技術趨勢 (36)
- AppStore (36)
- 新創 (36)
- 直播 (36)
- 汽車 (36)
- 遊戲開發 (36)
- 設計 (36)
- 監管機構 (35)
- 計劃 (35)
- 合作夥伴 (35)
- USB-C (35)
- 活動 (35)
- Copilot (35)
- 未來科技 (35)
- PlayStation (35)
- 股票 (35)
- A 輪融資 (34)
- 破產 (34)
- 購買 (34)
- Salesforce (34)
- 科技巨頭 (33)
- 氣候變遷 (33)
- 推特 (33)
- Windows (33)
- NASA (33)
- PrimeDay (33)
- 網路 (33)
- Mastodon (33)
- 網路攻擊 (32)
- 籌款 (32)
- 突破 (32)
- 支付 (32)
- 全球 (32)
- 虛擬實境 (32)
- 軟體 (32)
- AI 助手 (32)
- 封鎖 (32)
- 罷工 (32)
- 併購 (32)
- AMD (32)
- 禁止 (32)
- AWS (32)
- FTX (31)
- 播客 (31)
- 罰款 (31)
- 技術新聞 (31)
- 法國 (31)
- 獨角獸 (31)
- 產品 (31)
- YCombinator (31)
- 折扣 (30)
- 整合 (30)
- API (30)
- Rivian (30)
- 改變 (30)
- 發展 (30)
- 電子商務 (30)
- 自動駕駛 (30)
- 風險管理 (30)
- 數位化 (30)
- 出售 (30)
- 增長 (30)
- 晶片 (30)
- Anthropic (30)
- 股市 (30)
- 法案 (30)
- 盈利 (30)
- 資料安全 (29)
- 投資策略 (29)
- SamAltman (29)
- 模型 (29)
- Coinbase (29)
- 以太坊 (29)
- iPhone15Pro (29)
- 氣候科技 (29)
- 起訴 (29)
- 科技趨勢 (28)
- 安全性 (28)
- 計畫 (28)
- telegram (28)
- 拉丁美洲 (28)
- 協議 (28)
- 趨勢 (28)
- 解析 (28)
- Chrome (28)
- 創投 (28)
- ElonMusk (28)
- 無人機 (28)
- 資料保護 (28)
- 金融 (28)
- 裝置 (28)
- 可再生能源 (28)
- 學習 (27)
- 電動汽車 (27)
- SaaS (27)
- 資訊安全 (27)
- 網站 (27)
- GenAI (27)
- 訓練 (27)
- 加拿大 (27)
- A16z (27)
- 追蹤 (27)
- 種子輪融資 (27)
- 募集 (26)
- GitHub (26)
- Snapchat (26)
- 生成式 (26)
- Bluesky (26)
- 創業家 (26)
- 環境保護 (26)
- 發射 (26)
- VR (26)
- 革命 (26)
- 隱私保護 (26)
- 修復 (26)
- 訊息 (26)
- 以色列 (26)
- 搜尋引擎 (25)
- 觀看 (25)
- 語言模型 (25)
- 好萊塢 (25)
- Cybertruck (25)
- EpicGames (25)
- 創新科技 (25)
- 資料 (25)
- 加速 (25)
- 2024 (25)
- 智慧手錶 (25)
- 擴大 (25)
- 生產 (25)
- 電池 (25)
- 舊金山 (24)
- 蘋果公司 (24)
- 故事 (24)
- 攻擊 (24)
- Fortnite (24)
- 娛樂 (24)
- 研發 (24)
- 相機 (24)
- LLM (24)
- 演算法 (24)
- 下滑 (24)
- 機器人技術 (24)
- 肯亞 (24)
- technology (24)
- GPT-4 (24)
- 價值 (24)
- Unity (24)
- 第二季 (24)
- 瀏覽器 (24)
- 種子融資 (24)
- 大型語言模型 (24)
- 財經 (24)
- 成長 (24)
- BING (24)
- DeepMind (24)
- 虛擬現實 (23)
- 健康科技 (23)
- 報導 (23)
- 發布 (23)
- PayPal (23)
- LLMs (23)
- iPad (23)
- Zoom (23)
- 藝術家 (23)
- 竊取 (23)
- 幣安 (23)
- 音樂 (23)
- 電動腳踏車 (23)
- 隱私 (23)
- GoogleCloud (22)
- 團隊 (22)
- 降價 (22)
- Databricks (22)
- Sony (22)
- IBM (22)
- 刪除 (22)
- X 公司 (22)
- 加密 (22)
- 外洩 (22)
- 新產品 (22)
- 取消 (22)
- 選擇 (22)
- 最新訊息 (22)
- 人工智慧技術 (22)
- 驚喜 (22)
- 科技創新 (22)
- 蘋果手錶 (22)
- 新加坡 (21)
- AR (21)
- iMessage (21)
- 通用汽車 (21)
- 智慧手機 (21)
- 董事會 (21)
- 專訪 (21)
- Gmail (21)
- ActivisionBlizzard (21)
- 日本 (21)
- 智慧裝置 (21)
- disrupt (21)
- 市場趨勢 (21)
- 電視 (21)
- 勒索軟體 (21)
- FCC (21)
- Figma (21)
- 教育科技 (20)
- MetaQuest3 (20)
- 解決問題 (20)
- 智慧眼鏡 (20)
- 預告 (20)
- 創始人 (20)
- Intel (20)
- 抖音 (20)
- 熱潮 (20)
- 開發人員 (20)
- 崛起 (20)
- 合併 (20)
- XboxGamePass (20)
- 反壟斷 (20)
- 控告 (20)
- 巨頭 (20)
- 品牌 (20)
- CES2024 (20)
- Slack (19)
- Ubisoft (19)
- 漏洞 (19)
- LG (19)
- 資料庫 (19)
- GM (19)
- 入侵 (19)
- 策略 (19)
- AppleWatch (19)
- 雲端 (19)
- 製造商 (19)
- 澳洲 (19)
- 客戶 (19)
- 紐約市 (19)
- 企業管理 (19)
- 評估 (19)
- 免費 (19)
- 個人資料 (19)
- 筆記型電腦 (19)
- 法律 (19)
- 改進 (19)
- 英特爾 (19)
- 科技界 (19)
- 矽谷 (19)
- 山姆·班克曼-弗裏德 (19)
- MrBeast (19)
- 遊戲產業 (19)
- 高層 (19)
- 最佳化 (19)
- 版主 (19)
- 多元化 (18)
- 推文 (18)
- 軟體開發 (18)
- SamBankman-Fried (18)
- 信任 (18)
- Shein (18)
- 德國 (18)
- SBF (18)
- 資金支援 (18)
- Firefly (18)
- 目標 (18)
- GPU (18)
- 失敗 (18)
- Alexa (18)
- 解僱 (18)
- 故障 (18)
- 無線耳機 (18)
- 汽車產業 (18)
- 白宮 (18)
- 延遲 (18)
- 暫停 (18)
- 零日漏洞 (18)
- 青少年 (18)
- 搜尋 (18)
- 電子遊戲 (18)
- 新技術 (18)
- 銀行 (18)
- investment (18)
- 網際網路 (18)
- 駭客入侵 (18)
- 擴增實境 (18)
- 美國政府 (18)
- 美元 (18)
- MacBookAir (18)
- 分析 (17)
- AI 功能 (17)
- 開放人工智慧 (17)
- 社交網路 (17)
- 偏見 (17)
- Starfield (17)
- 批準 (17)
- 回歸 (17)
- 使用者體驗 (17)
- Switch (17)
- 強化 (17)
- 新時代 (17)
- Pixel (17)
- SteamDeck (17)
- 社交平臺 (17)
- 抗議 (17)
- 資料中心 (17)
- 指控 (17)
- 智慧 (17)
- 訂閱 (17)
- 打擊 (17)
- 製造 (17)
- 測試版 (17)
- 決勝時刻 (17)
- 頭戴式裝置 (17)
- 展示 (17)
- B 輪融資 (17)
- 未來趨勢 (17)
- 揭祕 (17)
- Pixel8 (17)
- 政府 (17)
- OnePlus (17)
- Stripe (17)
- 擔憂 (17)
- VanMoof (17)
- 問題解決 (17)
- 推薦 (17)
- EA (17)
- AI 聊天機器人 (17)
- 人類 (17)
- Mac (16)
- Arm (16)
- 預訂 (16)
- 預期 (16)
- 新款 (16)
- Fisker (16)
- 監控 (16)
- 比較 (16)
- 科技發展 (16)
- 穩定幣 (16)
- 使用 (16)
- 獨家報導 (16)
- 轉型 (16)
- 沃爾瑪 (16)
- 開放 AI (16)
- 神經網路 (16)
- 登場 (16)
- 人形機器人 (16)
- 工作 (16)
- 業務 (16)
- 3D 列印 (16)
- 軟體更新 (16)
- 內容 (16)
- 創業者 (16)
- 科學家 (16)
- 遊戲新聞 (16)
- 氣候變化 (16)
- 太陽能 (16)
- 高管 (16)
- 損失 (16)
- 富士康 (16)
- 機器人計程車 (16)
- 震撼 (16)
- 召回 (16)
- WWDC (15)
- GooglePixel8 (15)
- 作家 (15)
- 關注 (15)
- 開放 (15)
- Snowflake (15)
- Venmo (15)
- 效率提升 (15)
- 困境 (15)
- 區塊鏈技術 (15)
- 對決 (15)
- Pixel8Pro (15)
- 登陸 (15)
- 提升 (15)
- 太空 (15)
- 資料外洩 (15)
- 玩家 (15)
- 限時優惠 (15)
- 專案 (15)
- 討論 (15)
- 市場分析 (15)
- 保護 (15)
- 智慧科技 (15)
- 潛力 (15)
- YC (15)
- 奈及利亞 (15)
- 技巧 (15)
- 系統 (15)
- 訂閱服務 (15)
- 執行 (15)
- 消費者 (15)
- 付費 (15)
- 綠色能源 (15)
- 專注 (15)
- Gemini (15)
- 科技產品 (15)
- 拜登政府 (15)
- 社群 (15)
- 事件 (15)
- 數位貨幣 (15)
- 最佳 (15)
- 新聞標題 (15)
- 豐田 (15)
- 結束 (15)
- 軟銀 (15)
- 最新 (15)
- fundraising (15)
- 減少 (15)
- 科技產業 (15)
- 藝術 (15)
- Byju's (15)
- 經濟 (15)
- 革新 (15)
- 未來發展 (15)
- Tinder (15)
- Instacart (15)
- 建立 (14)
- 俄羅斯 (14)
- 審判 (14)
- Bard (14)
- 輕鬆 (14)
- 新科技 (14)
- LinkedIn (14)
- 商業模式 (14)
- 工廠 (14)
- 連結 (14)
- 科技業 (14)
- 拜登 (14)
- 新增 (14)
- 離職 (14)
- 韓國 (14)
- 政治 (14)
- 充電標準 (14)
- Valve (14)
- ETF (14)
- 強大 (14)
- 智慧財產權 (14)
- 聲音 (14)
- 虛擬貨幣 (14)
- Snap (14)
- Binance (14)
- 動力 (14)
- 招聘 (14)
- 時尚 (14)
- 原因 (14)
- 醫療科技 (14)
- 專家 (14)
- AI 驅動 (14)
- 倫理 (14)
- KaserFocus (14)
- 禁令 (14)
- 中小企業 (14)
- 製作 (14)
- 下載 (14)
- 參議院 (14)
- 首播 (14)
- 巴西 (14)
- 教育 (14)
- 國家 (14)
- Shopify (14)
- 資料洩露 (14)
- 退出 (14)
- 演員 (14)
- Worldcoin (14)
- 螢幕 (14)
- Starlink (14)
- 本田 (14)
- 視訊通話 (14)
- Samsung (14)
- 會議 (13)
- 漫威 (13)
- AppleVisionPro (13)
- 混亂 (13)
- 注資 (13)
- AI 生成 (13)
- 戰爭 (13)
- Verizon (13)
- 真相 (13)
- 價格分析 (13)
- 協作 (13)
- 促銷 (13)
- Matter (13)
- 科幻 (13)
- 勒索軟體攻擊 (13)
- 便宜 (13)
- 分享 (13)
- Messenger (13)
- 虛擬世界 (13)
- 方法 (13)
- 23andMe (13)
- Artifact (13)
- 客戶資料 (13)
- 智慧型手機 (13)
- 第三季 (13)
- 遊戲主機 (13)
- 紐約時報 (13)
- 充電器 (13)
- 主管 (13)
- 寶可夢 (13)
- 充電 (13)
- App (13)
- 手機應用程式 (13)
- 替代方案 (13)
- XRP (13)
- TCDisrupt2023 (13)
- 技術更新 (13)
- 多人遊戲 (13)
- 售出 (13)
- Airbnb (13)
- 行動 (13)
- 遊戲體驗 (13)
- Quest3 (13)
- 金融市場 (13)
- 消失 (13)
- 智慧化 (13)
- 釋出 (13)
- Epic (13)
- Substack (13)
- TheVerge (13)
- SOL (13)
- Ripple (13)
- 下一代 (13)
- 個性化 (13)
- GPT (13)
- Steam (13)
- 科技裁員 (13)
- 羅技 (13)
- Fitbit (13)
- 音樂串流 (13)
- 秋季 (13)
- 可靠性 (13)
- 紐約 (13)
- 指南 (13)
- Niantic (13)
- 實驗 (13)
- 作業系統 (13)
- 汽車製造商 (12)
- pitchdeck (12)
- AirPods (12)
- 創意 (12)
- 模型訓練 (12)
- 樂高 (12)
- 蘋果 VisionPro (12)
- 照片 (12)
- 特價 (12)
- 司法部 (12)
- 市值 (12)
- 資訊 (12)
- 新基金 (12)
- reels (12)
- 預購 (12)
- 遊戲平臺 (12)
- AirPodsPro (12)
- 遊戲公司 (12)
- 就業市場 (12)
- VBTransform (12)
- 資料處理 (12)
- 高通 (12)
- 優勢 (12)
- 硬體 (12)
- 電商 (12)
- 營收 (12)
- Google 搜尋 (12)
- Activision (12)
- 衛星 (12)
- 亞特蘭大 (12)
- 工程師 (12)
- 歷史 (12)
- 現代化 (12)
- 金融服務 (12)
- 獲利 (12)
- 管理 (12)
- 國會 (12)
- 頭戴裝置 (12)
- DoorDash (12)
- 媒體 (12)
- 改善 (12)
- MacBookPro (12)
- Beeper (12)
- 供應商 (12)
- 遊戲開發者 (12)
- 購物 (12)
- 動畫 (12)
- 共同創辦人 (12)
- tagnames (12)
- SPAC (12)
- eBay (12)
- Signal (12)
- 承諾 (12)
- 簡化 (12)
- 信用卡 (12)
- 十月 (12)
- VentureBeat (12)
- 準備 (12)
- DeFi (12)
- UberEats (12)
- 安全問題 (12)
- 擴張 (12)
- FBI (12)
- 量子計算 (12)
- 美國司法部 (12)
- 電腦 (12)
- 截止 (12)
- 重製版 (12)
- C 輪融資 (12)
- 生態系統 (12)
- 新車 (12)
- innovation (12)
- 月球 (12)
- 應用商店 (12)
- 電子郵件 (12)
- 終止 (12)
- 哈馬斯 (12)
- 賺錢 (12)
- 醫療保健 (11)
- 預覽 (11)
- 基礎設施 (11)
- Roku (11)
- 現貨 ETF (11)
- 人工智慧模型 (11)
- NFL (11)
- 機會 (11)
- 揭曉 (11)
- 費用 (11)
- 社會影響 (11)
- 車輛 (11)
- 前景 (11)
- 數位支付 (11)
- Flipkart (11)
- Kubernetes (11)
- 改革 (11)
- 大型科技公司 (11)
- 健康追蹤 (11)
- 黑鏡 (11)
- Apollo (11)
- 最高法院 (11)
- 保時捷 (11)
- 無廣告 (11)
- Cohere (11)
- 美國市場 (11)
- 貼文 (11)
- 健康 (11)
- 位元幣 (11)
- 雲端計算 (11)
- 即時通訊 (11)
- 軟體公司 (11)
- 取證 (11)
- 省錢 (11)
- 回應 (11)
- MicrosoftTeams (11)
- Xai (11)
- 安卓 (11)
- 物聯網 (11)
- VC (11)
- 探討 (11)
- 詐騙 (11)
- gaming (11)
- 揭露 (11)
- 減碳 (11)
- 技術問題 (11)
- 恢復 (11)
- 加速器 (11)
- PixelWatch2 (11)
- 藍色起源 (11)
- 科技投資 (11)
- 風險評估 (11)
- 政策 (11)
- 加密技術 (11)
- 投票 (11)
- 和解 (11)
- 表現 (11)
- 阿裏巴巴 (11)
- 溝通 (11)
- 月費 (11)
- 負責任 (11)
- 中東 (11)
- 對話 (11)
- 亞洲 (11)
- PC (11)
- 投訴 (11)
- GooglePixel (11)
- 分析師 (11)
- 去中心化 (11)
- 汽車科技 (11)
- 聯合創始人 (11)
- 重新設計 (11)
- 收益 (11)
- 進軍 (11)
- 教學 (11)
- 能源 (11)
- 惡意軟體 (11)
- 選舉 (11)
- 電腦視覺 (11)
- 進展 (11)
- 部署 (11)
- 5G (11)
- 臺灣 (11)
- 危險 (11)
- 旅行 (11)
- 宣稱 (11)
- 存取 (10)
- 粉絲 (10)
- 飆升 (10)
- NBA (10)
- GooglePlay (10)
- 個人化 (10)
- PrimeVideo (10)
- 大眾 (10)
- 價格上漲 (10)
- 重啟 (10)
- 編輯探索 (10)
- 風險投資家 (10)
- 熱議 (10)
- 比特幣價格分析 (10)
- 印尼 (10)
- HuggingFace (10)
- 技術公司 (10)
- RPG (10)
- 收費 (10)
- 透明度 (10)
- 效能提升 (10)
- 印度市場 (10)
- 紐西蘭 (10)
- 以太幣 (10)
- iPhone15ProMax (10)
- 市場策略 (10)
- TechCrunchEarlyStage (10)
- 墨西哥 (10)
- 人力資源 (10)
- 移除 (10)
- 聯想 (10)
- 種子輪 (10)
- 經典遊戲 (10)
- 生產力 (10)
- Sonos (10)
- 科技行業 (10)
- 升級版 (10)
- 遊戲業 (10)
- 上訴 (10)
- 外觀 (10)
- 快速充電 (10)
- 傳言 (10)
- 首次公開募股 (10)
- 密碼 (10)
- T-Mobile (10)
- 私有化 (10)
- 外掛 (10)
- 卡車 (10)
- 招募 (10)
- 假新聞 (10)
- TheDeanBeat (10)
- 傳聞 (10)
- 平板電腦 (10)
- 就業 (10)
- A 輪 (10)
- 音質 (10)
- 無人駕駛 (10)
- 協助 (10)
- 變革 (10)
- 增強現實 (10)
- Runway (10)
- 雲端服務 (10)
- 風投 (10)
- MaxQ (10)
- 速度 (10)
- AI 應用 (10)
- 批評 (10)
- 沃爾沃 (10)
- 有聲書 (10)
- 買家 (10)
- 馬克·祖克柏 (10)
- 烏克蘭 (10)
- 顯示器 (10)
- 星際大戰 (10)
- fediverse (10)
- 資產 (10)
- 門票 (10)
- 訂閱者 (10)
- 辦公室 (10)
- Everlodge (10)
- 標題 (10)
- 登入 (10)
- 企業資料 (10)
- 法庭 (10)
- 小工具 (10)
- CodeConference (10)
- 商業 (10)
- 西班牙 (10)
- 全電動 (10)
- 系列 (10)
- XboxSeriesX (10)
- MOVEit (10)
- ServiceNow (10)
- 規定 (10)
- Ring (10)
- 司機 (10)
- 下降 (10)
- 碳排放 (10)
- AI 監管 (10)
- 上漲 (10)
- 世界 (10)
- 農業科技 (10)
- 工作效率 (10)
- 潮流 (10)
- 節能 (10)
- Better.com (10)
- 風險投資公司 (10)
- iRobot (10)
- 利潤 (10)
- 數位資產 (10)
- 重塑 (10)
- PlayStationPlus (10)
- 火箭實驗室 (10)
- 串流 (10)
- 恐懼 (10)
- 加密貨幣交易所 (10)
- 減價 (9)
- 倒閉 (9)
- 電子產品 (9)
- 亞洲市場 (9)
- 搜尋功能 (9)
- Reliance (9)
- 自動駕駛汽車 (9)
- DemoDay (9)
- 回顧 (9)
- 創作 (9)
- 旅遊 (9)
- 重要性 (9)
- 間諜軟體 (9)
- 交通 (9)
- 聯合國 (9)
- 安全措施 (9)
- Grok (9)
- 亞馬遜 PrimeDay (9)
- 商家 (9)
- 生成式人工智慧技術 (9)
- Ford (9)
- 英偉達 (9)
- Prime 會員 (9)
- LindaYaccarino (9)
- TikTok 禁令 (9)
- GoogleAI (9)
- 歐洲市場 (9)
- 職業發展 (9)
- Q2 (9)
- 受害者 (9)
- 位元組跳動 (9)
- 加密專案 (9)
- 物流 (9)
- 募集資金 (9)
- VertexAI (9)
- 新趨勢 (9)
- 數 (9)
- 城市 (9)
- Google 地圖 (9)
- AI 倫理 (9)
- 研究發現 (9)
- 創造 (9)
- 短影片 (9)
- 暴雪 (9)
- BTC (9)
- 壟斷 (9)
- 打折 (9)
- 通行證 (9)
- 控制 (9)
- Siri (9)
- 敏捷開發 (9)
- PlayStation5 (9)
- 競賽 (9)
- 資料竊取 (9)
- 自駕卡車 (9)
- 領袖 (9)
- 新品 (9)
- Edge (9)
- 資料集 (9)
- 續航裏程 (9)
- cryptocurrency (9)
- 希望 (9)
- 資料管理 (9)
- PC 遊戲 (9)
- 電競 (9)
- 談判 (9)
- Photoshop (9)
- 地圖 (9)
- 影象生成 (9)
- 能力 (9)
- 壓力 (9)
- 聘請 (9)
- 放棄 (9)
- 動視暴雪 (9)
- 演講 (9)
- 律師 (9)
- 蘋果音樂 (9)
- 裁員趨勢 (9)
- 法官 (9)
- 娛樂產業 (9)
- 食品科技 (9)
- 技術應用 (9)
- 伺服器 (9)
- 飛行 (9)
- 鍵盤 (9)
- 危機 (9)
- GoogleChrome (9)
- 貸款 (9)
- 申請 (9)
- 心理健康 (9)
- DisneyPlus (9)
- Automattic (9)
- 交易所 (9)
- 刺客教條 (9)
- 機械鍵盤 (9)
- 進化 (9)
- 期待 (9)
- iFixit (9)
- 任務 (9)
- 巴勒斯坦 (9)
- Model3 (9)
- 提案 (9)
- 太空技術 (9)
- 維修 (9)
- CES (9)
- 女性 (9)
- 隱私問題 (9)
- socialmedia (9)
- 圖片 (9)
- 第三方應用程式 (9)
- 程式設計 (9)
- 社群媒體 (9)
- 高科技 (9)
- 技術革新 (9)
- MosaicML (9)
- 高盛 (9)
- 藍芽 (9)
- AT&T (9)
- 朋友 (9)
- 投資組合 (9)
- 寶馬 (9)
- 行銷 (9)
- 關係 (9)
- 川普 (9)
- 網紅 (9)
- Pornhub (9)
- 雲端運算 (9)
- 遊戲玩家 (9)
- Lyft (9)
- Flexport (9)
- 收入 (9)
- Peacock (9)
- 獎勵 (9)
- Oracle (9)
- DALL-E3 (9)
- 聯盟 (9)
- 引領 (9)
- 勝訴 (9)
- 資安 (9)
- Mastercard (9)
- 太空任務 (9)
- 倫敦 (9)
- 商機 (9)
- 兒童 (9)
- 華爾街 (9)
- 計程車 (9)
- 便利 (9)
- 上架 (9)
- FinTech (8)
- 內容創作 (8)
- Prosus (8)
- AI 影象生成器 (8)
- Chainlink (8)
- 離開 (8)
- 反彈 (8)
- 串流服務 (8)
- iPhone14 (8)
- 時間管理 (8)
- 新資金 (8)
- 頭戴式耳機 (8)
- MagSafe (8)
- 北韓 (8)
- 職位 (8)
- Chromebook (8)
- 企業市場 (8)
- 翻譯 (8)
- 震撼登場 (8)
- ElevenLabs (8)
- 使用者資料 (8)
- 延長 (8)
- AI 訓練 (8)
- 參加 (8)
- 程式碼 (8)
- 洩漏 (8)
- 錯誤 (8)
- AI 安全 (8)
- 聯邦貿易委員會 (8)
- GeForceNow (8)
- 股份 (8)
- 攝影機 (8)
- 團隊合作 (8)
- 氣候基金 (8)
- 控制器 (8)
- 000 美元 (8)
- 網站開發 (8)
- Bumble (8)
- 科學研究 (8)
- Brex (8)
- 神祕面紗 (8)
- 共和黨 (8)
- Ultra2 (8)
- 英雄聯盟 (8)
- 撤銷 (8)
- C 輪 (8)
- 價格調整 (8)
- 華碩 (8)
- 初創 (8)
- 下架 (8)
- TechCrunchEarlyStage2024 (8)
- 洛杉磯 (8)
- 資助 (8)
- 現代汽車 (8)
- 付款 (8)
- 科技企業 (8)
- 新方法 (8)
- 機器人吸塵器 (8)
- PanosPanay (8)
- 利益 (8)
- 全新 (8)
- 時間 (8)
- 旗艦 (8)
- 高品質 (8)
- 顛覆 (8)
- 發現 (8)
- 創作者經濟 (8)
- Patreon (8)
- 開源軟體 (8)
- Ramp (8)
- chatbot (8)
- 審查 (8)
- 無線 (8)
- macOS (8)
- 充電網路 (8)
- 製造業 (8)
- 安裝 (8)
- 智慧音箱 (8)
- 加入 (8)
- Dropbox (8)
- 未來展望 (8)
- 遊戲機 (8)
- Starship (8)
- 影音串流 (8)
- 冒險 (8)
- 獲得 (8)
- 牛市 (8)
- 超級電腦 (8)
- 房地產 (8)
- 民主化 (8)
- 角色扮演遊戲 (8)
- 發表會 (8)
- Astrobotic (8)
- 學生 (8)
- 夏季 (8)
- OLED (8)
- Max (8)
- 性別平等 (8)
- tweetdeck (8)
- 技術競爭 (8)
- 股權 (8)
- WGA (8)
- 高效 (8)
- 金額 (8)
- Teams (8)
- 立法者 (8)
- 設計工具 (8)
- 人 (8)
- 公司管理 (8)
- 節目 (8)
- 可摺疊手機 (8)
- PhonePe (8)
- 虧損 (8)
- 勝利 (8)
- YouTubeMusic (8)
- WebSummit (8)
- 商業策略 (8)
- 基準測試 (8)
- 跨境支付 (8)
- 小米 (8)
- 股價 (8)
- 軌道 (8)
- F-150Lightning (8)
- 欺騙 (8)
- 效能 (8)
- MWC2024 (8)
- Okta (8)
- Visa (8)
- GamesBeatNext (8)
- 電子競技 (8)
- Python (8)
- 遊戲工作室 (8)
- 人工智慧應用 (8)
- WeWork (8)
- Google 助理 (8)
- 工作流程 (8)
- 編輯 (8)
- 停止 (8)
- 大裁員 (8)
- 付費使用者 (8)
- 漲價 (8)
- 垃圾郵件 (8)
- 萊特幣 (8)
- 洩露 (8)
- 堡壘之夜 (8)
- Minecraft (8)
- 王國之淚 (8)
- Disrupt2024 (8)
- GoogleDocs (8)
- GoogleDeepMind (8)
- 太空船 (8)
- 框架 (8)
- 網頁 (8)
- 公開 (8)
- 蓬勃發展 (8)
- 新作 (8)
- 智慧系統 (8)
- B2B (8)
- Shutterstock (8)
- 影響力 (8)
- 炒作 (8)
- 非營利組織 (8)
- 重組 (8)
- 產業 (8)
- 新版本 (8)
- 驅動 (8)
- 商店 (8)
- 替代幣 (8)
- 財富管理 (8)
- 拉斯維加斯 (8)
- 轉向 (8)
- 角色 (8)
- 作者 (7)
- 荷蘭 (7)
- 飛利浦 Hue (7)
- 運動 (7)
- JonyIve (7)
- H-1B 簽證 (7)
- 超值 (7)
- cybersecurity (7)
- 拍攝 (7)
- notion (7)
- IndexVentures (7)
- 案件 (7)
- 最佳選擇 (7)
- 技術展示 (7)
- 退款 (7)
- 蘋果電視 (7)
- 維珍銀河 (7)
- 第三季度 (7)
- 報名 (7)
- 資料收集 (7)
- 人工智慧工具 (7)
- 撰寫 (7)
- 錢包 (7)
- 挪威 (7)
- 下載量 (7)
- 價格降低 (7)
- 機器狗 (7)
- 熱門話題 (7)
- 火災 (7)
- 考驗 (7)
- 降低 (7)
- 試用 (7)
- 禮物 (7)
- 角色扮演 (7)
- Robinhood (7)
- 科技創業 (7)
- 太空產業 (7)
- FireTV (7)
- 幻覺 (7)
- 認證 (7)
- 設定 (7)
- 多語言 (7)
- 影片平臺 (7)
- EV (7)
- Sequoia (7)
- 科技展 (7)
- 財務管理 (7)
- 賠償 (7)
- Qualcomm (7)
- 辯護 (7)
- BeReal (7)
- 處理器 (7)
- 臉書 (7)
- Echo (7)
- 影片製作 (7)
- 最低價 (7)
- 生物科技 (7)
- 阿凡達 (7)
- MistralAI (7)
- M2Ultra (7)
- LLaMA2 (7)
- 機器人公司 (7)
- 谷歌 (7)
- 強化學習 (7)
- 通訊軟體 (7)
- 1 億美元 (7)
- 祕密 (7)
- 思考 (7)
- 導演 (7)
- 專員 (7)
- 驚艷 (7)
- 亮點 (7)
- Office (7)
- 科技展覽 (7)
- 快速 (7)
- 道歉 (7)
- 建造 (7)
- DIY (7)
- Twilio (7)
- 破解 (7)
- AI 平臺 (7)
- 版本 (7)
- 音效 (7)
- 財務規劃 (7)
- 終結 (7)
- 文章 (7)
- 慶祝 (7)
- 折疊手機 (7)
- 環保技術 (7)
- 試玩 (7)
- 裁減 (7)
- 影片分享 (7)
- 羅布洛克斯 (7)
- 搜尋結果 (7)
- 書籍 (7)
- 新規定 (7)
- 工作室 (7)
- 公告 (7)
- 產品開發 (7)
- AI 動力 (7)
- M3 (7)
- 碳中和 (7)
- 帳號 (7)
- 證實 (7)
- 文字轉語音 (7)
- Computex (7)
- 模組化 (7)
- 發售日期 (7)
- 業績 (7)
- 印度政府 (7)
- 搶購 (7)
- 建議 (7)
- 選項 (7)
- 升溫 (7)
- 推動 (7)
- 影象 (7)
- 穩定 (7)
- Showtime (7)
- 康卡斯特 (7)
- 程式碼生成 (7)
- 閱讀 (7)
- 頭盔 (7)
- LockBit (7)
- 提示 (7)
- 檔案 (7)
- 轉移 (7)
- 挑戰者 (7)
- 零售 (7)
- 蜘蛛人 (7)
- 戴爾 (7)
- Inflection (7)
- 經典 (7)
- 福特汽車 (7)
- AI 新創公司 (7)
- NFLSundayTicket (7)
- 導航 (7)
- 需求 (7)
- 反壟斷調查 (7)
- ShibaInu (7)
- 領域 (7)
- 人工智慧功能 (7)
- 2025 年 (7)
- 騰訊 (7)
- 推遲 (7)
- Atlassian (7)
- 摺疊手機 (7)
- 爆紅 (7)
- 合規 (7)
- 大揭祕 (7)
- macOSSonoma (7)
- 現金 (7)
- Techstars (7)
- 廣告商 (7)
- 遠端工作 (7)
- Tumblr (7)
- 文化 (7)
- 移動應用程式 (7)
- 健康管理 (7)
- Arc 瀏覽器 (7)
- 機遇 (7)
- 新動向 (7)
- 削減 (7)
- 技術倫理 (7)
- TCDisrupt (7)
- venturecapital (7)
- 解釋 (7)
- FoundersFund (7)
- 新增功能 (7)
- 納斯達克 (7)
- Walmart (7)
- 恐怖遊戲 (7)
- 技術突破 (7)
- 超導體 (7)
- 反對 (7)
- 花費 (7)
- 百度 (7)
- 感測器 (7)
- Bungie (7)
- 更名 (7)
- FaceTime (7)
- Surface (7)
- 遊戲界 (7)
- 2023 (7)
- 編劇 (7)
- 頻道 (7)
- Web3 遊戲 (7)
- 遊戲串流 (7)
- 公開市場 (7)
- 家庭 (7)
- 空中計程車 (7)
- 規則 (7)
- 風潮 (7)
- 賓士 (7)
- 立法 (7)
- GoogleMeet (7)
- StabilityAI (7)
- 爆料 (7)
- Clubhouse (7)
- 暴漲 (7)
- 崩盤 (7)
- Plaid (7)
- 兒童安全 (7)
- Canva (7)
- 網站設計 (7)
- 崩潰 (7)
- Kickstarter (7)
- 麻省理工學院 (7)
- 聊天 (7)
- AI 法案 (7)
- AI 晶片 (7)
- 使用者數 (7)
- 合夥人 (7)
- 密碼管理器 (7)
- 資料洩漏 (7)
- 奧斯汀 (7)
- HorizonWorlds (7)
- 顧客 (7)
- 供應鏈 (7)
- InstagramThreads (7)
- 撤回 (7)
- 射擊遊戲 (7)
- 專利 (7)
- 玩具 (7)
- Hulu (7)
- 人機互動 (7)
- 註冊 (7)
- Polygon (7)
- 無人車 (7)
- 遊戲設計 (7)
- 最新動態 (7)
- 聚焦 (7)
- MetaQuest (7)
- 個人檔案 (6)
- 企業家 (6)
- 資訊科技 (6)
- 創新技術 (6)
- 股票市場 (6)
- 深科技 (6)
- 歌曲 (6)
- 清單 (6)
- gamedevelopment (6)
- 社交功能 (6)
- Sophie (6)
- 廣告收益 (6)
- Grayscale (6)
- 概念 (6)
- 無人計程車 (6)
- GooglePixelFold (6)
- 套裝 (6)
- GitHubCopilot (6)
- 預約 (6)
- 語音助手 (6)
- 種族歧視 (6)
- 資本 (6)
- Logitech (6)
- 開發商 (6)
- GoogleMaps (6)
- 充電站 (6)
- 奇蹟 (6)
- 孩子 (6)
- 技術分析 (6)
- 開發工具 (6)
- 使用方法 (6)
- 人工智慧安全 (6)
- RCS (6)
- 凱迪拉克 (6)
- 延期 (6)
- 太空公司 (6)
- 主播 (6)
- Cloudflare (6)
- 大規模 (6)
- 女性領導 (6)
- GDPR (6)
- 道德 (6)
- 現身 (6)
- 訂單 (6)
- 全球市場 (6)
- 7700XT (6)
- UAW (6)
- 揭密 (6)
- Disney (6)
- SAG-AFTRA (6)
- Podcast (6)
- Metaverse (6)
- 合約 (6)
- 互動 (6)
- iPhone12 (6)
- Alameda (6)
- 社群平臺 (6)
- 增加 (6)
- AI 公司 (6)
- 星界 (6)
- 零信任 (6)
- 續航力 (6)
- 影片生成 (6)
- 創業投資 (6)
- 串流平臺 (6)
- 昂貴 (6)
- QR 碼 (6)
- TuSimple (6)
- Intuit (6)
- 樂觀 (6)
- GalaxyZFold5 (6)
- 小說 (6)
- 拒絕 (6)
- 社群互動 (6)
- 破紀錄 (6)
- firefox (6)
- 聯合創辦人 (6)
- 送貨 (6)
- 足球 (6)
- 釋出會 (6)
- 義大利 (6)
- 播放清單 (6)
- 觀眾 (6)
- Affirm (6)
- 解鎖 (6)
- 反壟斷訴訟 (6)
- 冠軍 (6)
- 技術合作 (6)
- 同理心 (6)
- 遊戲活動 (6)
- 變化 (6)
- 數量 (6)
- 風險投資者 (6)
- 資產管理 (6)
- FedNow (6)
- 內容審查 (6)
- GoogleBard (6)
- 4K (6)
- 魔法 (6)
- 耳塞 (6)
- 低成本 (6)
- Shorts (6)
- 翻新 (6)
- 庫存 (6)
- iOS 應用程式 (6)
- 桌上型 (6)
- 開放銀行 (6)
- iPadOS (6)
- 女性領袖 (6)
- 種子資金 (6)
- 電池工廠 (6)
- UK (6)
- 演變 (6)
- 禁用 (6)
- 披露 (6)
- 沙烏地阿拉伯 (6)
- kindle (6)
- 競爭力 (6)
- 開啟 (6)
- 舒適 (6)
- 早鳥票 (6)
- 激增 (6)
- 訪談 (6)
- 安全功能 (6)
- DoKwon (6)
- 體育賽事 (6)
- AmazonPrimeDay (6)
- PlayStationPortal (6)
- 實況主 (6)
- 影像處理 (6)
- RX7800XT (6)
- 亞馬遜 Prime (6)
- 智慧助手 (6)
- AI 引擎 (6)
- Play 商店 (6)
- 挫折 (6)
- Excel (6)
- RocketLab (6)
- 實驗室 (6)
- Lightspeed (6)
- ESPN (6)
- Neeva (6)
- 預算 (6)
- 記者 (6)
- 效率 (6)
- 停用 (6)
- 可持續 (6)
- Fidelity (6)
- 盛事 (6)
- 配件 (6)
- 平板 (6)
- 好處 (6)
- 科技禮物 (6)
- 主題演講 (6)
- 簡單 (6)
- 熱門 (6)
- Bird (6)
- 投影機 (6)
- EX30 (6)
- 財務長 (6)
- 簡報 (6)
- VinFast (6)
- 祕訣 (6)
- TerraformLabs (6)
- 週報 (6)
- 音樂產業 (6)
- 打造 (6)
- 風格 (6)
- 保險科技 (6)
- 新報告 (6)
- 法規 (6)
- 車型 (6)
- DMA (6)
- 瑪利歐 (6)
- 印度科技 (6)
- 影像辨識 (6)
- Atlas (6)
- Paytm (6)
- 大揭密 (6)
- 淘汰 (6)
- 奇幻 (6)
- 訂閱人數 (6)
- 通話 (6)
- 議員 (6)
- 檢視 (6)
- 員工福利 (6)
- BMW (6)
- 資金注入 (6)
- 雲端儲存 (6)
- 宣傳 (6)
- 網購 (6)
- 可持續能源 (6)
- 瑞典 (6)
- 拓展 (6)
- 影象處理 (6)
- 早期階段 (6)
- 地球 (6)
- Klarna (6)
- 細節 (6)
- Arc (6)
- 英國政府 (6)
- 決定 (6)
- 北美 (6)
- 勞動力 (6)
- 創造力 (6)
- 能源轉型 (6)
- 辨識 (6)
- 交付 (6)
- 裁決 (6)
- 身臨其境 (6)
- 3D (6)
- 企業解決方案 (6)
- MacStudio (6)
- 反壟斷案 (6)
- 一加 (6)
- 零件 (6)
- Astra (6)
- 拆分 (6)
- 雲端技術 (6)
- 版權 (6)
- Dogecoin (6)
- Circle (6)
- 增強 (6)
- 投資風險 (6)
- 標準 (6)
- 矚目 (6)
- Aptos (6)
- 低價 (6)
- 8BitDo (6)
- 東南亞 (6)
- 方式 (6)
- 德克薩斯州 (6)
- 蘋果產品 (6)
- 新遊戲 (6)
- SAP (6)
- 電動滑板車 (6)
- 安全平臺 (6)
- Quest (6)
- 雲原生 (6)
- terraform (6)
- 擴充套件業務 (6)
- 自訂 (6)
- 浪潮 (6)
- 理解 (6)
- 手遊 (6)
- 現代 (6)
- VR 遊戲 (6)
- 簽證 (6)
- 規格 (6)
- 新紀元 (6)
- 價格下調 (6)
- 風波 (6)
- 總裁 (6)
- ESG (6)
- 吸引力 (6)
- XboxSeriesS (6)
- AR 技術 (6)
- 網友 (6)
- 演進 (6)
- Vimeo (6)
- 利器 (6)
- 禮物推薦 (6)
- 電視劇 (6)
- 可信度 (6)
- GalaxyZFlip5 (6)
- 總部 (6)
- 研究者 (6)
- 電馭叛客 2077 (6)
- 聆聽 (6)
- 暴跌 (6)
- 隱私權 (6)
- Carta (6)
- SUV (6)
- PM (6)
- StackOverflow (6)
- Getir (6)
- 內容創作者 (6)
- 開始 (6)
- 重要 (6)
- 決策 (6)
- 狗狗幣 (6)
- WearOS (6)
- 構建 (6)
- 參議員 (6)
- 交易者 (6)
- 歷史新高 (6)
- 現代戰爭 III (6)
- 瑞波幣 (6)
- 模擬 (6)
- 可持續性 (6)
- VMware (6)
- TCEarlyStage2024 (6)
- 克拉納 (6)
- 太空旅行 (6)
- 比特幣 ETF (6)
- 記憶體 (6)
- TechCrunchLive (6)
- 身份取證 (6)
- 定價 (6)
- neuralink (6)
- 特價優惠 (6)
- 科學 (6)
- 高速公路 (6)
- Flipboard (6)
- 意義 (6)
- 餐廳 (6)
- 股票交易 (6)
- Web3.0 (6)
- 超級計算機 (6)
- Mozilla (6)
- 真人版 (6)
- 啟動 (6)
- 聯絡 (6)